La Fabricación Aditiva impulsa nuevos avances en Robótica blanda
La robótica blanda, o soft robotics, es una rama en constante crecimiento dentro del campo de la robótica industrial. A diferencia de los robots tradicionales construidos con materiales rígidos, los robots blandos están hechos de materiales flexibles y deformables, lo que les permite adaptarse y trabajar en entornos dinámicos y variables de una manera más segura y eficiente. Una de las áreas clave que está impulsando el avance de la robótica blanda es la aplicación o combinación de esta tecnología con la fabricación aditiva [1]. Las características clave de los robots blandos incluyen:
- Flexibilidad y adaptabilidad: Su capacidad para deformarse y adaptarse a diversas formas y superficies.
- Seguridad: Su naturaleza blanda los hace seguros para interactuar con humanos y entornos delicados.
- Personalización: La posibilidad de diseñar robots específicos para tareas particulares gracias a la versatilidad de los materiales y las técnicas de fabricación.
Aplicaciones de Soft Robotics
Los robots blandos tienen una amplia gama de aplicaciones en diversos campos, desde la medicina hasta la exploración espacial. Algunas de las aplicaciones más interesantes incluyen:
- Aplicación Médica: Los robots blandos son ideales para interactuar con tejidos biológicos delicados, en cierta manera debido a que suelen estar inspirados en estas características biomecánicas, lo que los hace perfectos para adaptarse a aplicaciones médicas como la cirugía mínimamente invasiva, la rehabilitación o la asistencia a personas con movilidad reducida mediante “wearables”[3].
- Manipulación de Entornos Peligrosos: Debido a su capacidad para adaptarse a entornos variables y su naturaleza segura para los humanos, los robots blandos son ideales para tareas de exploración y manipulación en entornos peligrosos, como la exploración submarina, la inspección de estructuras o medios con agentes tóxicos o radioactivos.
- Agricultura y Manipulación de Alimentos: En la agricultura, los robots blandos pueden manejar productos delicados sin dañarlos, lo que es crucial para la cosecha y el procesamiento de alimentos. La creación de pinzas y manipuladores personalizados que se adaptan a diferentes formas y tamaños de productos agroalimentarios es muy versátil para este ámbito.
- Robótica colaborativa: La robótica es un componente indispensable en las líneas de producción, a diferencia de la robótica dura convencional, la robótica blanda trabaja codo a codo con humanos de una manera segura y eficiente, lo que los hace ideales para aplicaciones de asistencia en fábricas y almacenes [4].
Técnicas y materiales empleados en Soft Robotics por fabricación aditiva
La fabricación de robots blandos se beneficia enormemente de las tecnologías avanzadas de fabricación aditiva, también conocida como impresión 3D. La fabricación aditiva ha revolucionado la forma en que se diseñan y produce la robótica blanda, permitiendo una mayor personalización, flexibilidad y eficiencia en su fabricación. Algunas de las técnicas de fabricación aditiva utilizadas en soft robotics incluyen:
- Impresión de Materiales Flexibles: La fabricación aditiva de filamento/pellet fundido (FDM/FGF), es una tecnología que permite la creación de estructuras complejas con materiales flexibles como elastómeros termoplásticos (TPU/TPE) o siliconas (PDMS), capaces de estirarse y deformarse significativamente sin romperse, esenciales para la fabricación de robots blandos. También los hidrogeles, materiales que pueden absorber grandes cantidades de agua y cambiar de forma, son utilizados en aplicaciones médicas y biológicas, proporcionando una mayor adaptabilidad y funcionalidad a los campos de uso de esta tecnología.
- Impresión de materiales 4D: Estos materiales son capaces de cambiar sus características como su forma, estructura o funcionalidad en respuesta a estímulos externos como temperatura, humedad, luz, corriente eléctrica o incluso magnetismo. La integración de materiales 4D en soft robotics abre nuevas posibilidades para la creación de robots adaptables y autoconfigurables que pueden cambiar su función según las necesidades del entorno o la tarea [6].
- Impresión Multi-Material: La capacidad de imprimir objetos con múltiples materiales y técnicas de fabricación aditiva como FDM y Direct Ink Writing (DIW) en una sola operación permite la creación de estructuras con propiedades mecánicas y funcionales variadas, lo que es crucial para la fabricación de robots blandos con actuadores y sensores integrados. La combinación de tintas “estrechables”, especialmente formulados para mantener sus propiedades eléctricas y mecánicas cuando se someten a deformaciones, son utilizadas en la impresión de circuitos electrónicos. Estas tintas en combinación con polímeros conductores cargados con diferentes aditivos de base carbonosa son bastante utilizados para integrar funciones electrónicas y sensoriales en los robots blandos, obteniendo dispositivos inteligentes con capacidades de detección y actuación [5].
- Integración de Sensores y Electrónica: Hasta ahora, la mayoría de los sistemas integrados de robótica blanda han dependido de la electrónica rígida tradicional para almacenar los algoritmos de control y conectarse a los actuadores, sensores y fuentes de energía. No obstante, recientemente se ha realizado un gran esfuerzo en el campo de la electrónica blanda para acometer y potenciar la integración de esta electrónica en los desarrollos de actuadores de este tipo. La combinación de los materiales estructurales flexibles, funcionales 4D y las técnicas de impresión multimaterial permiten la integración directa de sensores, actuadores y componentes electrónicos en la estructura de los robots blandos, lo que simplifica el proceso de fabricación reduciendo la complejidad de ensamblaje y aportando características y funcionalidades avanzadas [2].
AIMPLAS y Soft Robotics
AIMPLAS dedica esfuerzos en avances sobre robótica blanda, concretamente en el proyecto SOFTRONIC, donde fusiona diversas tecnologías emergentes de fabricación aditiva para crear dispositivos inteligentes que aunen estos dos mundos.
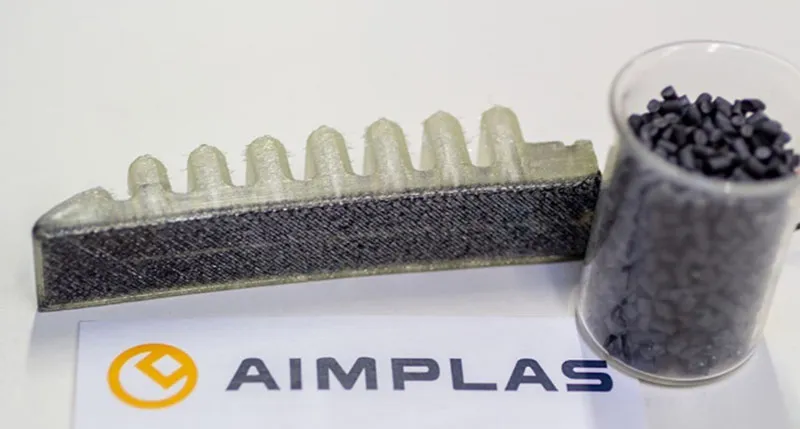
En el contexto de este proyecto, se han desarrollado polímeros elastoméricos y polímeros conductores eléctricos que se utilizan para fabricar actuadores neumáticos con electrónica integrada mediante un proceso de fabricación aditiva híbrida, optimizando así los pasos posteriores de embebido de electrónica.

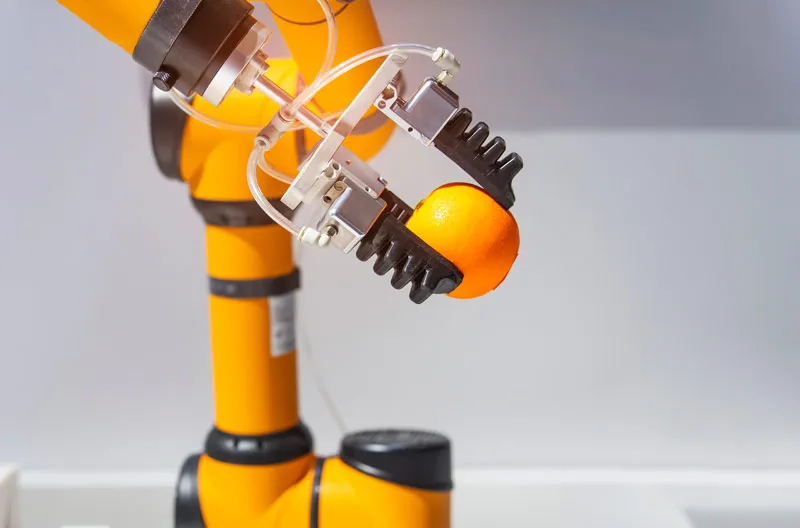
Demostrador soft robotics del proyecto SOFTRONIC realizado por AIMPLAS
Esta innovación ha dado lugar a una garra neumática equipada con sensores de flexión integrados. Estos sensores permiten ajustar la presión según el objeto que se manipula, sin necesidad de cambiar el tipo de garra según la dureza del objeto. Esto agiliza el proceso de manipulación entre lotes de productos.
En línea con este desarrollo AIMPLAS, en colaboración con la Universidad Carlos III de Madrid, está trabajando en el desarrollo y la evaluación electromecánica de sensores flexibles impresos en 3D para su integración en articulaciones de robots y humanoides. Se han evaluado diversas propiedades de este sensor flexible, haciendo énfasis en indicadores de desempeño claves para determinar de forma práctica la aplicabilidad de estos dispositivos en la robótica blanda. Entre las principales ventajas de este sensor destaca su comportamiento piezorresistivo que demuestra la efectividad en los procesos de fabricación de polímeros conductores eléctricos desarrollados por AIMPLAS. Además, exhibe una excelente repetitividad y muy buena reproducibilidad evaluadas mediante pruebas cíclicas que someten al sensor a condiciones de uso prolongado.
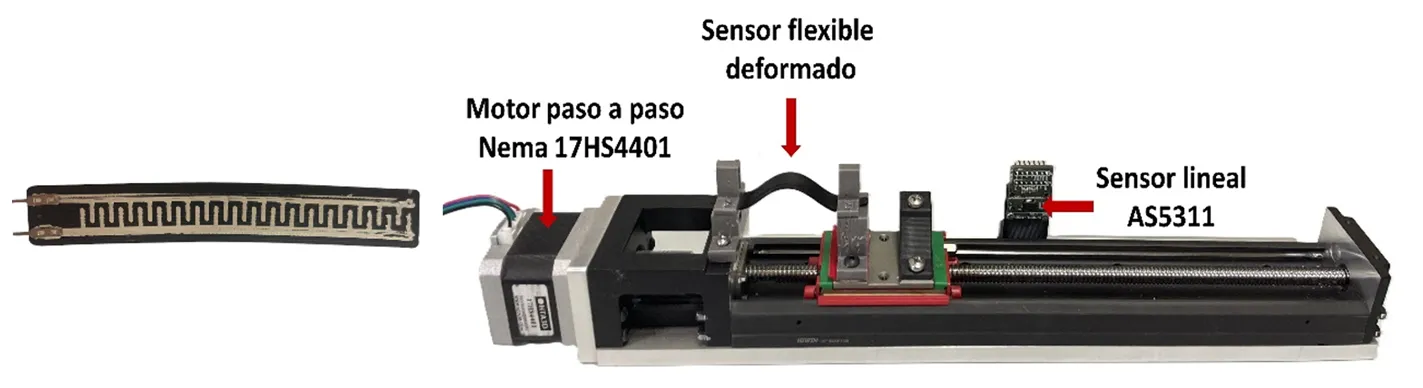
Banco de pruebas de materiales empleado para los ensayos electromecánicos del sensor flexible.
Los ensayos electromecánicos desarrollados por la Universidad Carlos III de Madrid han demostrado, además de las ventajas, las áreas de optimización de estos sensores flexibles. Fundamentalmente, mejorar la linealidad influirá de forma directa en un rango de trabajo más amplio manteniendo una elevada sensibilidad. Los resultados fruto de esta colaboración permiten continuar trabajando en la optimización de estos dispositivos buscando su futura incorporación en diversas plataformas robóticas blandas [7] [8]. De esta forma, se contribuye significativamente a impulsar la tecnología en este campo y obtener robots blandos más adaptables y eficientes, capaces de desempeñar tareas complejas con mayor precisión y seguridad.
El Futuro de Soft Robotics y Fabricación Aditiva
La robótica blanda, con su capacidad de adaptarse a diferentes entornos gracias a los materiales flexibles, está experimentando un rápido crecimiento en la industria, impulsada en gran medida por su combinación con la fabricación aditiva. Ofreciendo ventajas como la personalización, la reducción en el uso de material y la agilidad en la creación de prototipos, lo que esta revolucionado la forma en que se diseñan y fabrican robots blandos. La integración de materiales flexibles, materiales funcionales 4D, la impresión multi-material e incluso la incorporación directa de sensores y electrónica en la estructura de estos robots está abriendo nuevas posibilidades en áreas como la medicina, la exploración espacial y la industria. Ejemplos representados en proyectos como SOFTRONIC o en colaboración con universidades como la Carlos III de Madrid, ejemplifican perfectamente estos nuevos avances, ya que para avanzar, es crucial seguir investigando, fomentar la colaboración entre disciplinas, integrar otros desarrollos colaborativos y buscar aplicaciones prácticas que impulsen aún más la innovación en este emocionante campo tecnológico.
Daniel Rodríguez del Rosario | Técnico I+D en Fabricación Aditiva en AIMPLAS
Referencias
- Rus, D., & Tolley, M. T. (2015). Design, fabrication and control of soft robots. Nature, 521(7553), 467-475.
- Majidi, C. (2014). Soft robotics: a perspective—current trends and prospects for the future. Soft Robotics, 1(1), 5-11.
- Kim, S., Laschi, C., & Trimmer, B. (2013). Soft robotics: a bioinspired evolution in robotics. Trends in Biotechnology, 31(5), 287-294.
- Whitesides, G. M. (2018). Soft robotics. Angewandte Chemie International Edition, 57(16), 4258-4273.
- Shih, B., Lin, Z. C., & Suo, Z. (2012). Stretchable conductors as soft interconnects for dielectric elastomer actuators. Applied Physics Letters, 100(11), 114103.
- López-Valdeolivas, M., Liu, D., Broer, D. J., & Sánchez-Somolinos, C. (Year). 4D Printed Actuators with Soft-Robotic Functions. Journal Name, Volume(Issue), Page Range.
- Nagua L, Relaño C, Monje CA, Balaguer C. A New Approach of Soft Joint Based on a Cable-Driven Parallel Mechanism for Robotic Applications. Mathematics. 2021; 9(13):1468. https://doi.org/10.3390/math9131468
- Continelli, N. A., Nagua Cuenca, L. F., Monje, C. A. y Balaguer, C. . (2023) «Modelado de un cuello robótico blando mediante aprendizaje automático», Revista Iberoamericana de Automática e Informática industrial, 20(3), pp. 282–292. doi: 10.4995/riai.2023.18752.